标题: LongCat-Flash Technical Report[1]
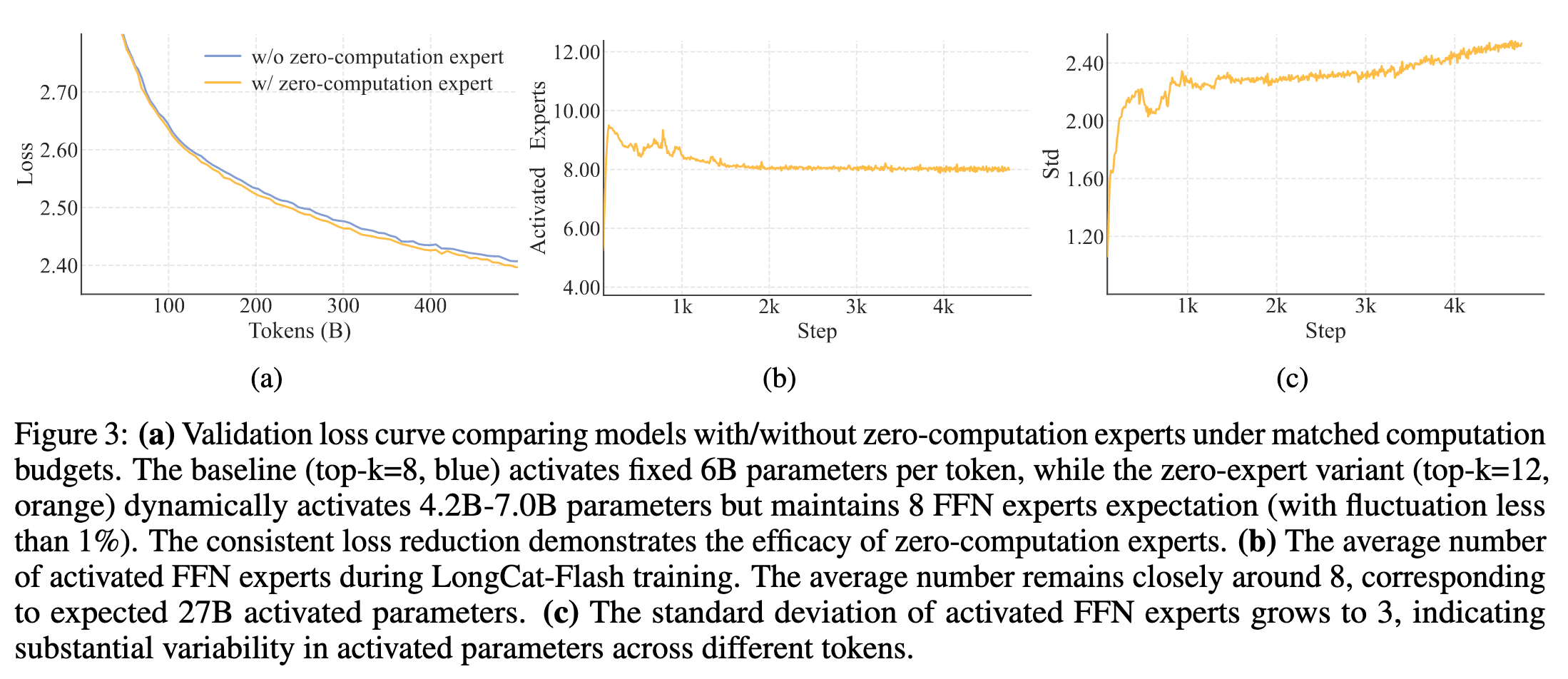
LongCat-Flash 共 560B 参数量,激活 18.6B–31.3B 参数量的模型,平均 27B 参数量。比较注重计算效率和 Agent 能力。采用了两种不同的架构设计:zero-computation experts 和 shortcut-connected MoE (scMoE)。训练方法上对模型尺度变换进行了方差修正,并提出了一些训练稳定性技术。
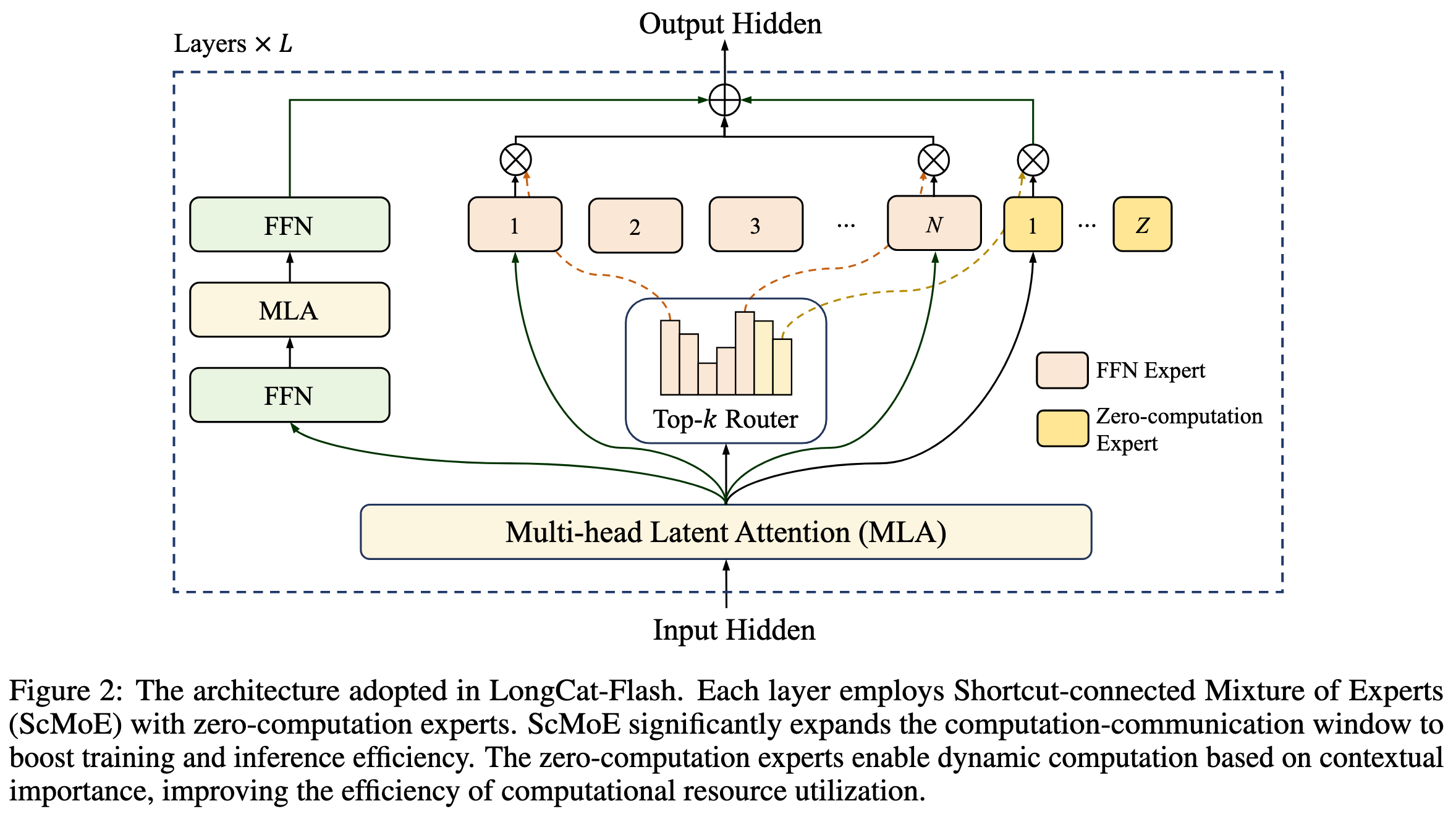
1. Zero-computation Experts
不是每个 token 都是平等的。deepseek v3.2 exp 的稀疏注意力也是这个思想。困难的 token 需要更多的资源进行准确预测。而更容易的 token 则需要忽略一些计算。

1.1 预算控制
通过专家偏置[2]来进行控制:
其中,\(T_{all}\) 表示 \(batch\) 数量,\(T_i\) 表示被路由到第 \(i\) 个专家的数量。\(K_e\) 表示 FFN 专家的数量,\(K\) 表示总的专家数量。
(相当于路由到这个专家的 tokens 越多,偏置项 \(b\) 就越小,后续这个专家的得分就越低。但是这会受到数据混合策略的影响,如果一个 batch 中所有数据都是和 code 相关的,可能就会导致这个偏置项过低,影响后续 code 数据被路由专家。所以说在训练时感觉需要注意数据的混合策略,可以分组混合而不是随机混合。)
偏置项的更新通过 PID (Proportional-Integral-Derivative)控制器来实现。确保第 \(i\) 个专家的 token 分配收敛到目标概率。随着专家数量的扩大,这种机制提高了 Softmax 路由概率分布的鲁棒性。 但是,零计算专家的偏置项不参与更新,当 FFN 专家收敛后自然就能满足约束。
1.2 负载均衡
预算控制中的 \(b_i\) 可以实现语料水平的负载均衡。为了进一步防止 EP 组(Expert Partition groups,专家分组)在 “序列级别” 出现极端不均衡,引入了设备级负载均衡损失。
假设所有 \(N\) 个 FFN 专家被划分为 \(D\) 组,每组包含 \(G= \frac{N}{D}\) 个专家。此外,所有零计算专家被归为第 \(D+1\) 组。负载均衡损失 \(\mathcal{L}_{\text{LB}}\) 由以下部分构成:
2. Shortcut-connected MoE
参考[3],主要是为了缓解专家并行的通信开销。有三种连接方式:
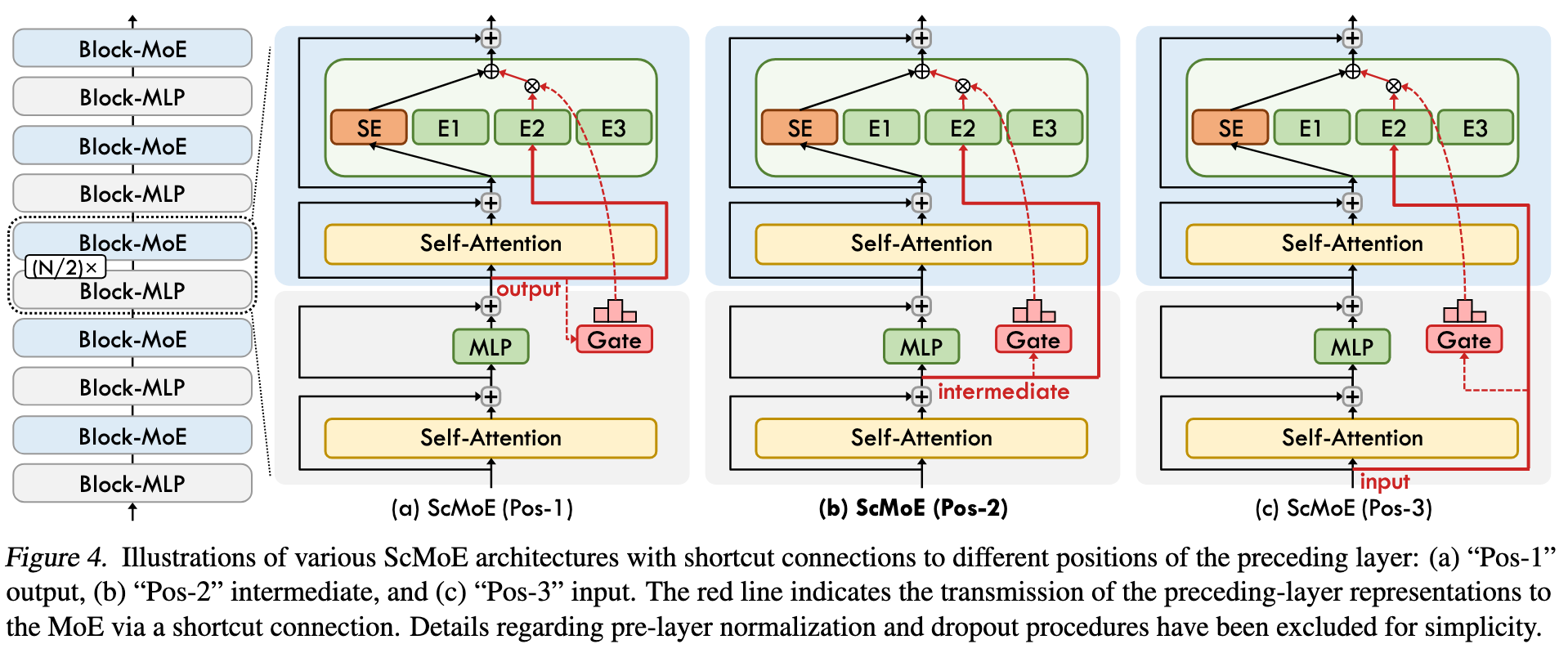
报告里没说是哪一种,不过实验验证了 scMoE 并不会降低模型效果。
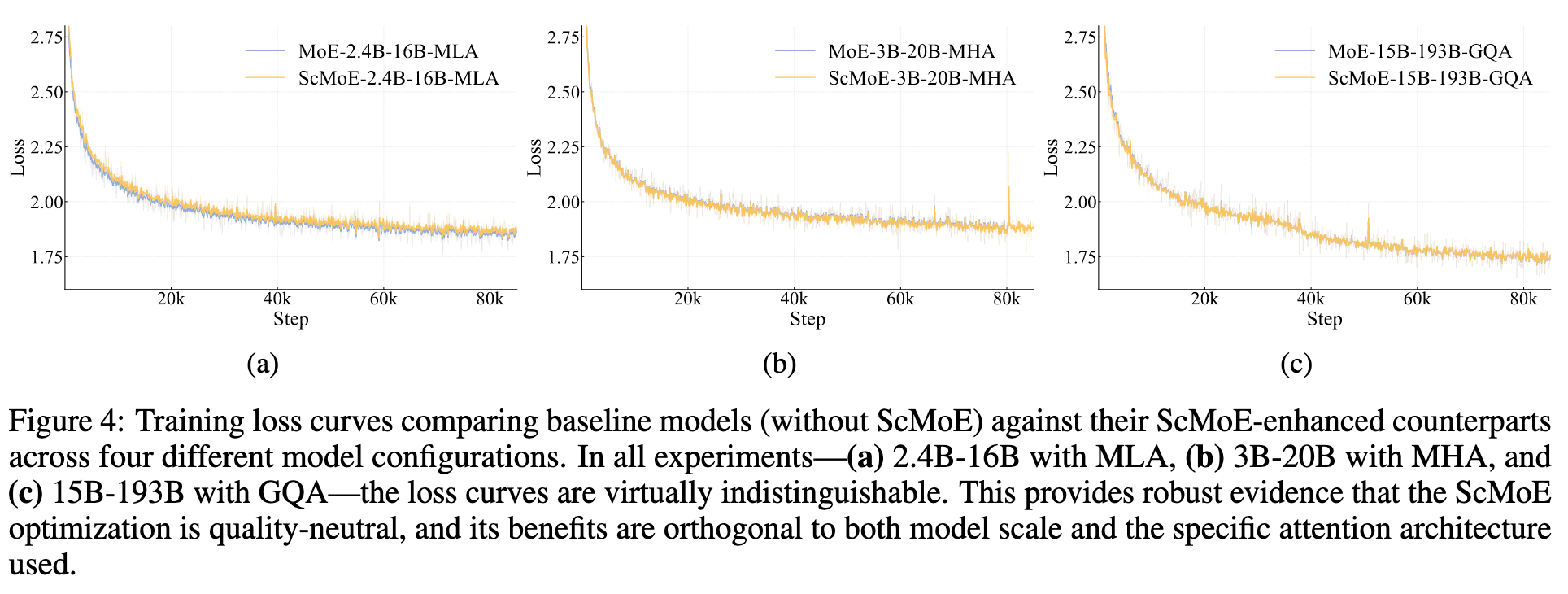
而且,这种架构为推理和训练提供了显著的系统级效率的提升🧐。
3. Variance Alignment Design for Scalability
小尺度模型上的架构设计随着模型尺度的增大可能会变得次优,LongCat 团队经过大量实验和理论分析,验证了特定模块的方差失调是导致这种现象的主要原因。所以,他们提出了 MLA 和 MoE 中的方差对齐技术。
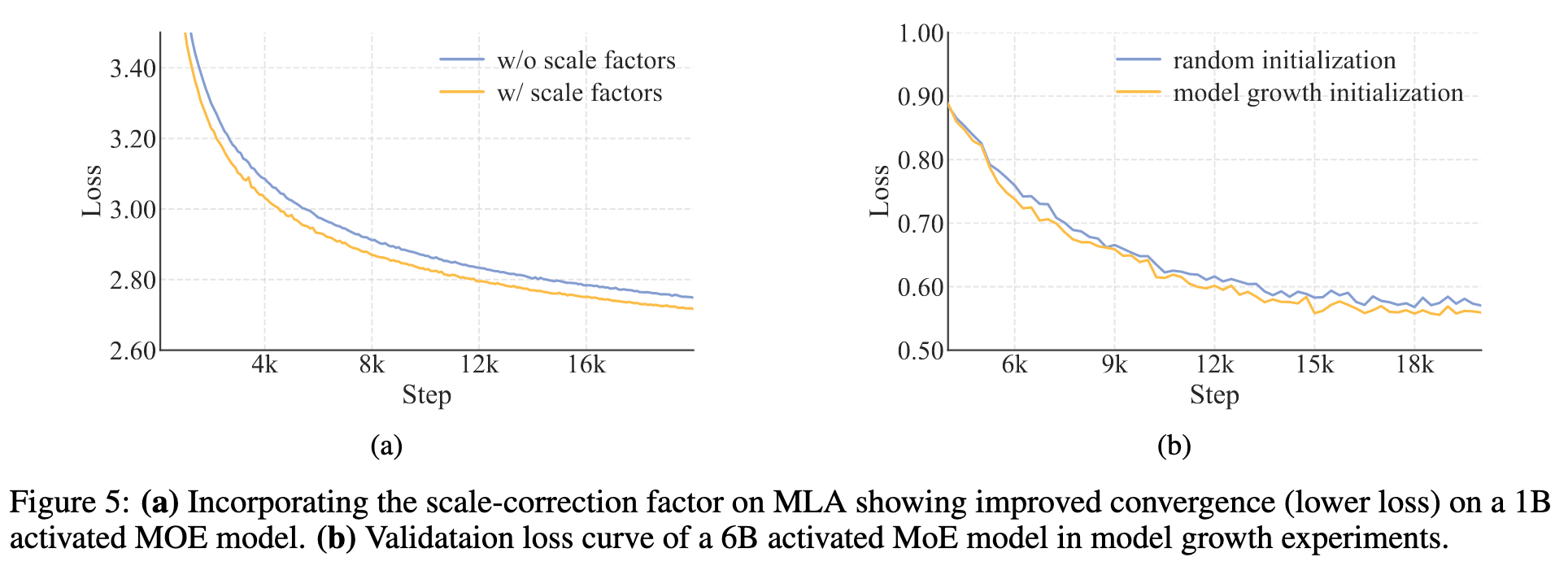
3.1 Scale-Correction for MLA
加入尺度矫正因子 \(\alpha_q\) 和 \(\alpha_{kv}\) 来解决低秩分解中的方差失调问题。
在初始化时,方差与维度成比例:\(\sigma^2(q_t^C)\),\(\sigma^2(q_t^R) \propto d_q\);\(\sigma^2(k_t^C) \propto d_{kv}\),\(\sigma^2(k_t^R) \propto d_{\text{model}}\)。当 \(d_q\)、\(d_{kv}\) 和 \(d_{\text{model}}\) 发生变化时,这种维度差异会在初始化时导致注意力分数不稳定,进而在模型缩放过程中造成性能下降且不可预测。
3.2 Variance Compensation for Experts Initialization
LongCat-Flash 采用类似 DeepSeek-MoE 细粒度专家的策略,但是这种策略对结构的选择比较敏感。所以,他们提出了一种方差补偿机制,以抵消专家分割导致的初始化方差减少。
其中 \(g_i\) 是对 \(mN\) 个细粒度专家的路由输出,\(N\) 表示分割前专家的总数。
\(\gamma\) 是通过量化方差减少的两个主要来源来计算的:
-
门控:将每个原始的 \(N\) 个专家分解为 \(m\) 个更细粒度的专家,会将专家总数扩展到 \(mN\)。Softmax 就会在更大的专家池中分配其概率质量,按比例降低单个专家权重 \(g_i\) 的大小。因此,输出方差大约降低了 \(m\) 倍。 -
维度:每个细粒度专家的中间隐藏维度(\(d_{\text{expert\_inter}}\))降低了 \(m\) 倍。假设参数初始化均匀,单个专家的输出方差也会降低 \(m\) 倍。
为了在初始化时保持 MoE 层的输出方差,\(\gamma\) 必须补偿这两种效应。因此,组合方差补偿因子为 \(\gamma = \sqrt{m \cdot m} = m\)。
4. 参数初始化
先随机初始化一个小模型,然后再堆叠小模型继续训练。实验验证这种方法比随机初始化效果更好(上面图5)。LongCat 团队认为主要有两个原因:
-
较小模型的更快收敛可能为大规模训练提供更高质量的参数初始化。 -
模型规模增大可能引入额外的正则化效果。
5. 训练稳定性
5.1 MoE 路由稳定
-
给 token 分配更合适的专家(LM) -
token 分配到的专家更均匀(LB)
为了平衡上述两种损失,引入了梯度正则比例:
其中 \(\mathcal{L}_{\text{LB}}\) 是在不考虑系数 \(\alpha\) 时计算的负载均衡损失,\(\vec{P}\) 是每个 batch 专家概率向量(门控网络的 logits 经过 Softmax 得到)的平均值。
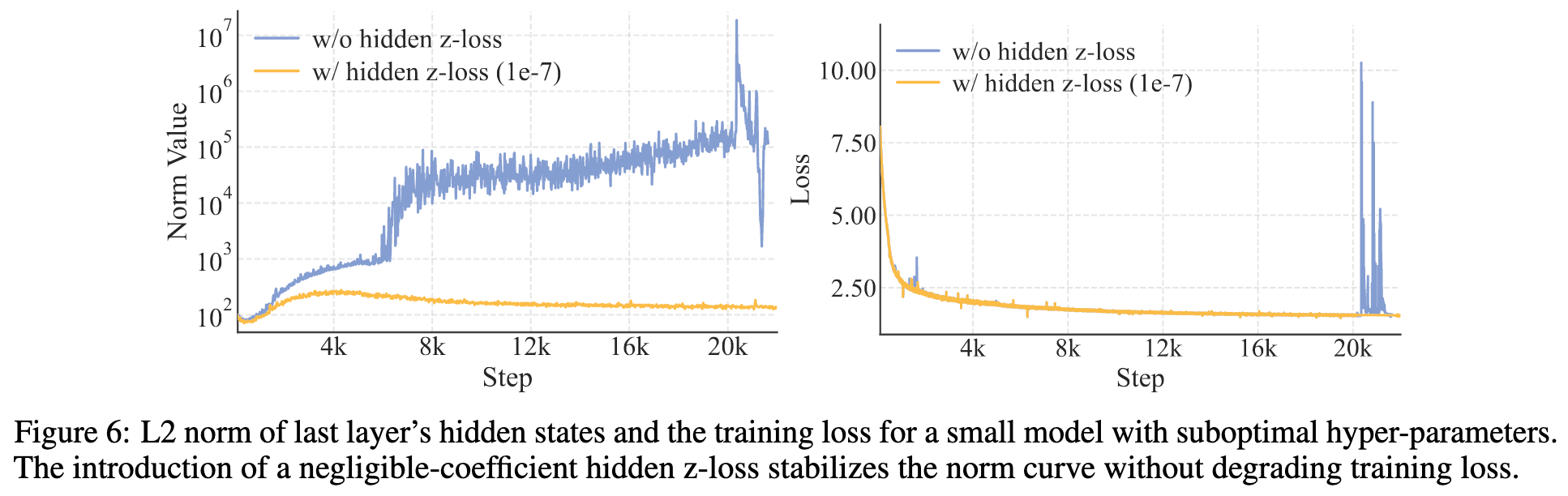
5.2 激活值稳定
LongCat 团队发现,massive activation 与训练过程中的 loss 峰值有关。所以引入了 z-loss 来抑制不合理的极大值。
5.3 优化器稳定
随着模型规模的增大,Adam 中的\( \epsilon \)超参数变得越来越重要。通过跟踪梯度的 RMS Norm 发现:当\( \epsilon \)接近梯度的 RMS Norm 时,模型效果会显著下降;而更低的\( \epsilon \)对模型性能影响不大。实验结果如下图。LongCat-Flash 用的是\( \epsilon=1e-16 \)。
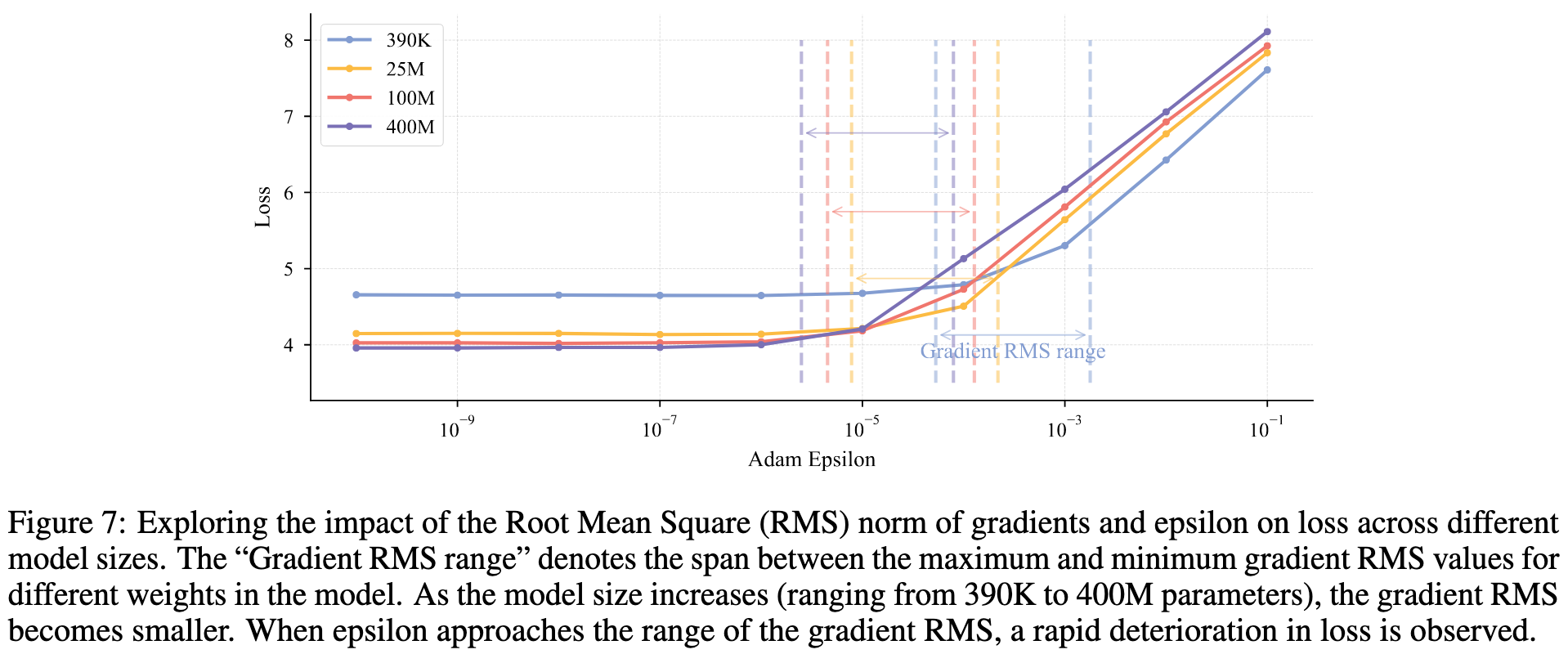
大白话就是,模型规模越大,参数初始化时越小,导致梯度 RMS Norm 越小,所以需要更小的 \( \epsilon \)。
6. 笔者总结
技术报告还是挺详细的,从模型架构,训练方法,数据构造等方面都介绍了。模型主要关注推理效率和 Agent 能力,所以整体性能上可能没有那么突出。但是里面用到的一些技术,实验结果,和分析都挺有参考价值的。
7. References
-
LongCat-Flash Technical Report -
Auxiliary-Loss-Free Load Balancing Strategy for Mixture-of-Experts -
Shortcut-connected Expert Parallelism for Accelerating Mixture-of-Experts